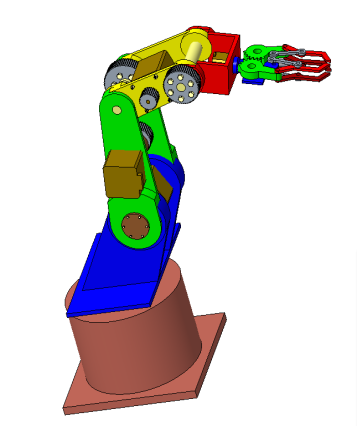
玻璃杯搬運五自由度機械手設計
- 文件介紹:
- 該文件為 docx 格式,下載需要 20 積分
-
- 玻璃杯搬運五自由度機械手設計目 錄
1 緒論 4
1.1 機器人概述 4
1.2 國內外發展狀況 4
1.3 機械手的組成 5
2 機械手臂的總體結構設計 6
2.1 機械手的傳動方案設計 6
2.2 搬運機械手結構方案設計 6
2.3自由度分析及確定 10
2.4 機械手的主要技術參數 10
3 搬運機械手各部件設計、計算 12
3.1 搬運機械手手部結構設計及計算 12
3.2 搬運機械手手腕結構設計 14
3.3 小臂結構設計 18
3.4 大臂結構設計 21
3.5 腰部結構設計 22
4 軸和軸承的設計與校核 24
4.1搬運機械手軸設計與校核 24
4.2 軸承設計與校核 28
5 總結 30
6 參考文獻 31
玻璃瓶搬運五自由度機械手設計
摘 要: 隨著科技不斷發展,機器人已經進入人們視野,特別在工業上的應用。現代各個學科技術的不斷發展,搬運機械手的應用領域也大大拓展。搬運機械手在識別貨物后,通過視覺傳感器掃描工作環境,從而獲得數據,自動計算出最短路徑,實現貨物有一地搬運到另一地。機械手已經有工業向家庭的發展趨勢。本畢業設計將設計一臺五自由度的工業機械手,用于搬運小物品(例如玻璃杯),重點對機械手的機械結構設計。首先,本文對搬運機械手進行總體設計,確定設計方案;然后通過選擇合適的傳動方式、驅動方式;最后設計機械手的底座、手、手腕、大小臂等結構及尺寸。實現機械手的最基本功能。
關鍵詞:五自由度;機械手;結構設計
...
 熱門關鍵詞:
熱門關鍵詞: 

